
")
Let us consider as we did in our article Introduction to Tensors the transformation of a vector A under a rotation θ of the coordinate system.
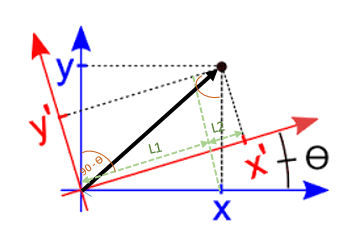
The components A'x and A'y of the vector A in the primed/rotated coordinate system relative to the components Ax and Ay in the unprimed/untransformed coordinate system can be defined as follows:
More precisely, whe have shown that the vector components in the new primed coordinate system could be written as below, and represent thus weighted linear combinations of the original components.
Using matrix representation and Einstein summation convention, we can equivalently write:

Tensors as a generalisation of vectors
Now let us generalize the concept of a vector by considering objects carrying more indices.
Imagine a collection of mathematical objects Tij carrying two indices, with i,j = 1,2,..,N in N-dimensional space.
If the Tij , which represent a collection of N2 mathematical entities transform into linear combinations of one another (exactly as the vector components do), then Tij is a tensor.
We thus can generalize the tensor components transformation as per below

That's all we need to know ;-)
If we try to illustrate this, let us list Tij explicitly for N=3. There are 32 = 9 components, which are T11, T12, T13, T21, T22, T23, T31, T32, T33. That's it, nine objects that transform into linear combinations of one another.
For example, the above equation says that T'31 transforms like

hence is given by a particular linear combination of the nine objects (tensor components in the initial referential).
This fundamental result could be generalized further, into 3-indexed tensors, 4-indexed tensors and so forth.